Entradas
|
Tipo
|
Unidad
|
Descripción
|
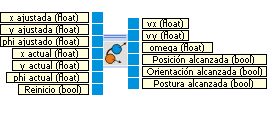
x ajustada
|
float
|
mm
|
coordenada x de la posición ajustada en el sistema global de coordenadas.
|
y ajustada
|
float
|
mm
|
coordenada y de la posición ajustada en el sistema global de coordenadas.
|
phi ajustado
|
float
|
Grados
|
orientación phi de la posición ajustada en el sistema global de coordenadas.
|
x actual
|
float
|
mm
|
coordenada x de la posición actual en el sistema global de coordenadas.
|
y actual
|
float
|
mm
|
coordenada y de la posición actual en el sistema global de coordenadas.
|
phi actual
|
float
|
Grados
|
orientación phi de la posición actual en el sistema global de coordenadas.
|
Reinicio
|
bool
|
|
Reiniciar movimiento
|
|
|
|
|
Salidas
|
|
|
|
vx
|
float
|
mm/s
|
ajustar velocidad en dirección x en el sistema local de coordenadas del Robotino
|
vy
|
float
|
mm/s
|
ajustar velocidad en dirección y en el sistema local de coordenadas del Robotino
|
omega
|
float
|
gra/s
|
velocidad angular ajustada.
|
Posición alcanzada
|
bool
|
|
Es verdadero (true) si vx=vy=0, es decir, se ha alcanzado la posición ajustada.
|
Orientación alcanzada
|
bool
|
|
Es verdadero (true) si omega=0, es decir, se ha alcanzado la orientación ajustada.
|
Pose alcanzada
|
bool
|
|
Es verdadero (true) si se ha alcanzado la posición y la orientación (la pose).
|