|
<< Click to Display Table of Contents >> Stellgröße (2) |
  
|
|
<< Click to Display Table of Contents >> Stellgröße (2) |
|
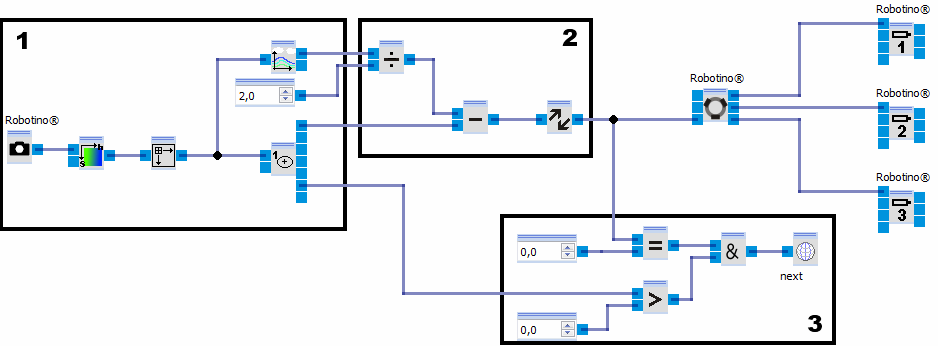
Die Stellgröße für die Rotation berechnet sich aus der halben Bildbreite minus der x-Koordinate des roten Zylinders im Bild. Danach bildet eine Transferfunktion diese Werte in der Einheit Bildpunkte auf die Rotationsgeschwindigkeit in Grad pro Sekunde ab.
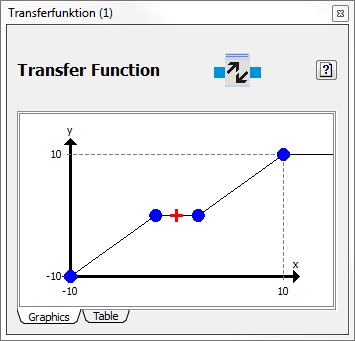
Der Eingangswert der Transferfunktion ist der Abstand des roten Zylinders zu Bildmitte in Pixel. Ist dieser Abstand kleine -10 Pixel, so rotiert Robotino mit -10 deg/s. Bis zu einem Abstand von -2 Pixel nimmt die Rotationsgeschwindigkeit auf 0 ab. Ab 2 Pixel Abweichung steigt die Rotationsgeschwindigkeit bis maximal 10 deg/s bei einer Abweichung von 10 Pixel.
Wenn der rote Zylinder nicht sichtbar ist, gibt der Segmentverfolger x-Koordinate 0 aus. Der Eingangswert der Transferfunktion ist in diesem Fall die halbe Bildgröße, so dass sich Robotino mit 10 deg/s dreht.