|
<< Click to Display Table of Contents >> Positionsfahrer |
  
|
|
<< Click to Display Table of Contents >> Positionsfahrer |
|
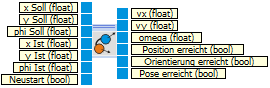
Mit dem Positionsfahrer können Positionen angefahren werden.
Der Positionsfahrer berechnet aus einer Soll- und einer Istposition Geschwindigkeit und Winkelgeschwindigkeit, so dass Robotino von der Ist- zur Sollposition fährt.
Eingänge |
Typ |
Einheit |
Beschreibung |
x Soll |
float |
mm |
x Koordinate der Soll Position im Weltkoordinatensystem. |
y Soll |
float |
mm |
y Koordinate der Soll Position im Weltkoordinatensystem. |
phi Soll |
float |
Grad |
Winkel phi der Soll Position im Weltkoordinatensystem. |
x Ist |
float |
mm |
x Koordinate der Ist-Position im Weltkoordinatensystem. |
y Ist |
float |
mm |
y Koordinate der Ist-Position im Weltkoordinatensystem. |
phi Ist |
float |
Grad |
Winkel phi der Ist-Position im Weltkoordinatensystem. |
Neustart |
bool |
Startet die Bewegung erneut |
|
Ausgänge |
|||
vx |
float |
mm/s |
x Geschwindigkeit. |
vy |
float |
mm/s |
y Geschwindigkeit. |
omega |
float |
Grad/s |
Winkelgeschwindigkeit. |
Position erreicht |
bool |
Sobald die Ausgänge vx und vy 0 liefern, wird die Zielposition als erreicht angesehen und der Ausgang liefert wahr. |
|
Orientierung erreicht |
bool |
Sobald der Ausgang omega 0 liefern, wird die Zielorientierung als erreicht angesehen und der Ausgang liefert wahr. |
|
Pose erreicht |
bool |
Der Ausgang liefert wahr, wenn sowohl die Zielposition als auch die Zielorientierung erreicht sind. Ansonsten unwahr. |
Siehe Bewegungen