|
<< Click to Display Table of Contents >> Dialog |
  
|
|
<< Click to Display Table of Contents >> Dialog |
|
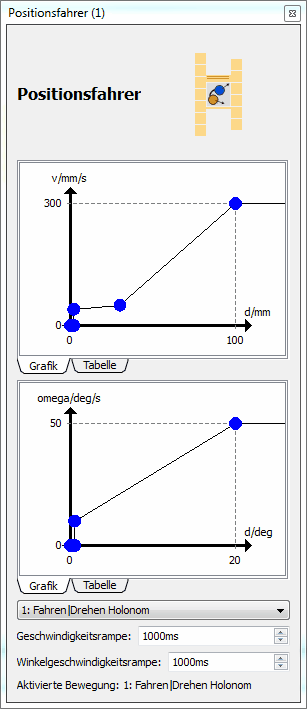
Der Dialog zum Positionsfahrer gliedert sich in drei Bereiche.
Im oberen Bereich wird die Beziehung zwischen Distanz zur Zielposition d (gemessen in mm) und der zu fahrenden Geschwindigkeit v (gemessen in mm/s) angegeben.
Im mittleren Bereich wird die Beziehung zwischen Winkeldistanz zum Zielwinkel d (gemessen in 1°) und der Rotationsgeschwindigkeit omega (gemessen in 1°/s) angegeben. Die Winkeldistanz variiert dabei zwischen 0° und 180°. Drehungen im oder gegen den Uhrzeigersinn werden symmetrisch behandelt. Die Drehung wird im oder gegen den Uhrzeigersinn ausgeführt, so dass die Drehdistanz minimal ist.
Mittels der ComboBox
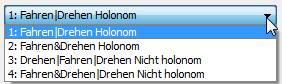
wird die Art der Bewegung festgelegt (siehe Bewegungen). Die hier gewählte Bewegung wird zur aktivierten Bewegung bei
| 1. | Programmstart |
| 2. | Wenn der Eingang Neustart auf wahr gesetzt wird |
Die Geschwindigkeitsrampe ist die Zeit in Millisekunden, nach welcher 100% der gewünschten Geschwindigkeit erreicht werden. Dadurch wird ein abrupter Anstieg der Geschwindigkeit zu Beginn der Bewegung vermieden.
Die Winkelgeschwindigkeitsrampe ist die Zeit in Millisekunden, nach welcher 100% der Rotationsgeschwindigkeit erreicht werden. Dies dient ebenfalls zur Dämpfung der Bewegung, wenn eine neue Rotation beginnt.