|
<< Click to Display Table of Contents >> Bewegungen |
  
|
|
<< Click to Display Table of Contents >> Bewegungen |
|
Es sind vier Arten von Bewegungen möglich. Davon sind jeweils zwei für holonome und nicht holonome Fahrzeuge geeignet. Da Robotino über einen holonomen Antrieb verfügt - alle drei Freiheitsgrade in der Ebene können unabhängig verändert werden - kann Robotino alle vier Bewegungen ausführen. Bei den nicht holonomen Bewegungen ist der Ausgang vy konstant gleich 0.
Bewegungen beginnen bei Programmstart oder wenn der Eingang Neustart wahr wird. Effektiv beginnt die Bewegung im 2. Fall erst dann, wenn der Eingang Neustart wieder zurück auf unwahr gesetzt wird.
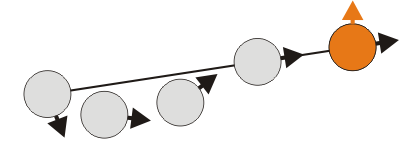
Bewegung 1 - fahren, drehen - (holonom)
Schritt 1: Fahren zur Zielposition unter Beibehaltung der Orientierung an der Startposition
Schritt 2: Nach erreichen der Zielposition drehen bis zur Zielorientierung
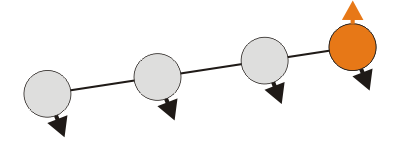
Bewegung 2 - fahren & drehen - (holonom)
Schritt 1: Fahren und gleichzeitig drehen zur Zielorientierung
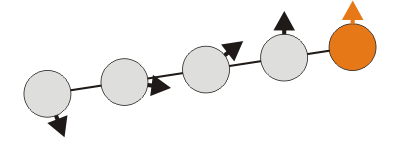
Bewegung 3 - drehen, fahren, drehen - (nicht holonom)
Schritt 1: Drehen in Fahrtrichtung
Schritt 2: Fahren zur Zielposition
Schritt 3: Nach erreichen der Zielposition drehen bis zur Zielorientierung
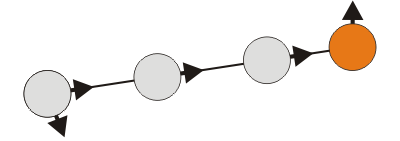
Bewegung 4 - fahren & drehen, drehen - (nicht holonom)
Schritt 1: Fahren und drehen in Fahrtrichtung
Schritt 2: Nach erreichen der Zielposition drehen bis zur Zielorientierung